ZWO最近送测了一台AM5赤道仪,我架到三脚架上一开光,导星均方误差(RMS)直接到了1.41角秒。当时就觉得这个赤道仪实在是太烂了,1.41角秒这是在搞笑么。于是我把同样的器材挪到了贵了35000元的带码盘的彩虹RST-135e上,在相近的时间对着同一片天区拍摄,打算来吊打AM5然后去群里嘲讽。结果发现误差也有1.19角秒。鸭鸭震惊.jpg之余控制住了怒砸赤道仪的冲动,我意识到了这可能是因为我对导星系统有着相当大的误解,犯了不少错误,所以花了大约三十个小时具体做了很多实验和测量,有了很多心得体会,最终把同一台RST-135e的导星误差可靠地调到了0.3x角秒,同一台AM5的导星误差可靠地调到了0.4x角秒,两台赤道仪拍摄的半小时单帧都非常优秀。在这篇文章里,想分享一下学到的东西,希望对大家有启发。
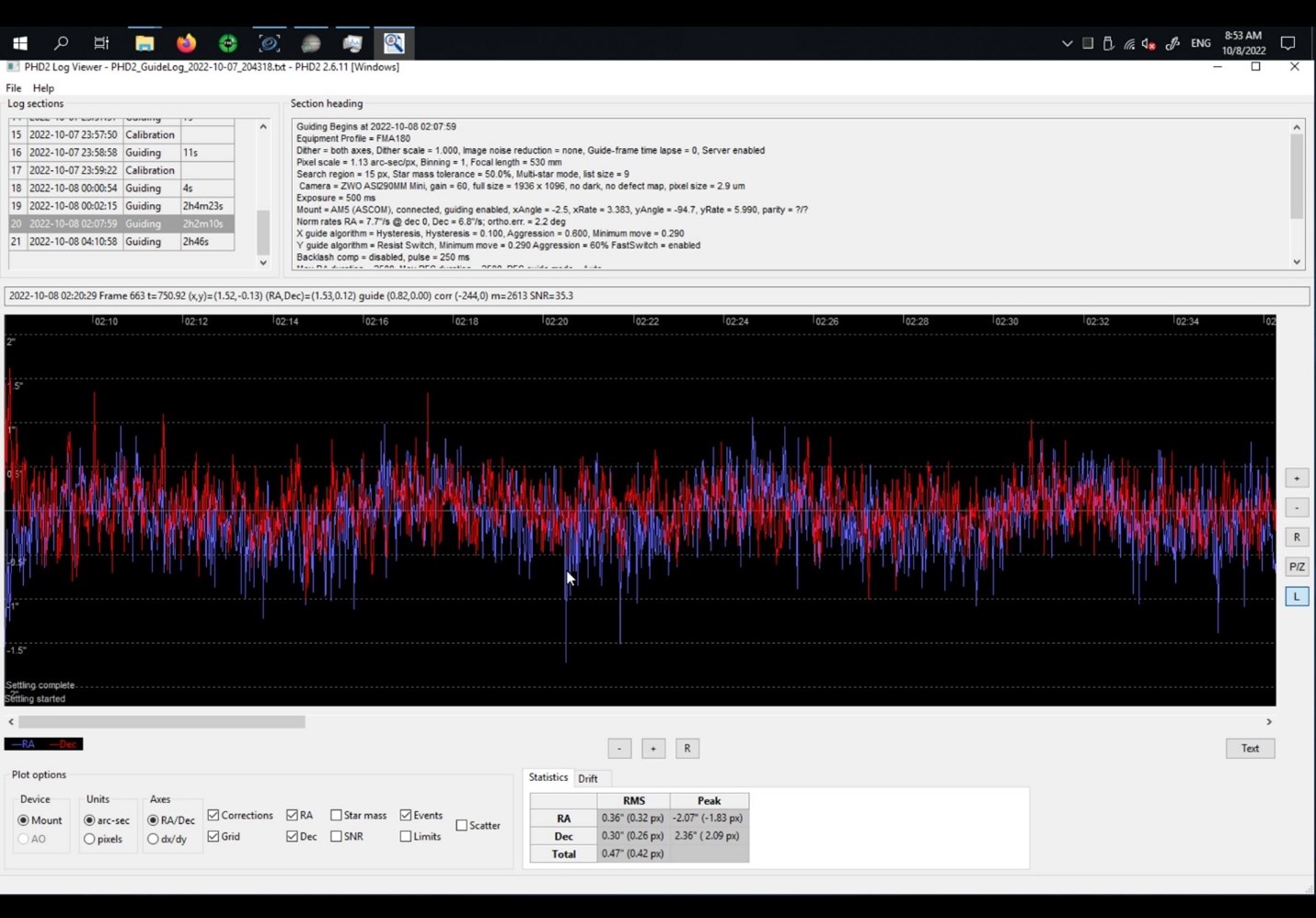 图1:调整后的AM5拍摄2个多小时的平均导星误差为0.47角秒,截图右上方有具体配置和算法参数
图1:调整后的AM5拍摄2个多小时的平均导星误差为0.47角秒,截图右上方有具体配置和算法参数
在介绍具体的技术心得之前,我想先讲讲更重要的方法论。天文摄影为什么这么难,是因为牵扯到的因素实在是太多了。赤道仪系统也是这样。想要有好的星点,需要在极轴,机械系统刚度,导星镜/OAG,算法参数,当然还有赤道仪本身的选择上,下很多功夫去测量和优化。这是个非常复杂的系统问题,很有可能会让人非常挫败——互相矛盾的测量结果,怎么尝试都无法改进,别人的经验拿过来在我这就没用。这很正常,是天文摄影的一部分。我的经验是,有以下几个要点可以加速这个过程,至少让它不那么痛苦:
-
想清楚星点对你来说是否重要。比如如果你像我一样,主要拍广域马赛克,那再烂的星点,bin4出图也就是一个像素。这种情况其实根本就不用在乎星点,自然也就不用经历这些痛苦。我只是最近被"尊贵的RST-135e竟然和1/4价格的AM5导星误差差不多"这个观察激发了好胜心,才开始研究这些东西。
-
控制变量。这可能是最重要的一点。很多时候坊间流传的观察,"如果我做XXX,那么星点就会变好",都是非常不严谨的经验总结。比较的两边可能器材,视宁,天区一个都不一样。或者有各种前提。跟着这些经验去做,很可能得不到想要的结果。在调试过程中,本着对自己负责的态度,还是需要控制变量。比如用同一个器材,在类似的时间,指向同一片天区等等。这样才能真的调好,而不是似是而非得到一些好像好了,但又不能可靠重现的结果,坑的是自己。
-
快速交叉验证。我们在调整的过程中会有很多假设,比如"这个星点不好是不是因为三脚架刚度不够导致极轴偏移?"虽然我们可以买个新三脚架然后看看没有没有改进,但这样迭代速度会慢很多。如果我们用一些软件,测量一下在赤道仪不同指向下的极轴误差的话,就可以很快验证这些结论。所以如果我们有一些新的假设,要多思考一下有没有什么巧妙的方法在短时间内验证这些假设,而不是偷懒就用最简单(但往往低效)的方法。
-
多器材对比。受客观条件限制,这个可能不适用于所有人。但如果有多个器材互相对比的话,可以极大地加速系统调节的过程。一个现成的例子就是,如果我没有RST-135e对比,可能就觉得是AM5垃圾,骂一顿就过去了。但因为有对比,才启发我具体研究探索,发现哦是重锤的问题,三角架的问题等等,一方面学到了很多东西,一方面也让RST-135e发挥了它的实力。
-
最后,一种非常常见的情况是有情绪。调整的过程中肯定会经历一个阶段,"这个厂商的产品太垃圾了,灭门保平安,我去换友商"。这非常正常。但冷静下来看,这样寄希望用一个很简单的手段(换门)解决一个十几个因素交织在一起的系统性问题(星点不好)的想法有些过分理想粗暴。我的建议是先用快速交叉验证,看看如果真的换门了,能不能解决问题。一个例子是周围有大佬用A品牌的全家桶调星点调崩溃了,觉得肯定是遇到了坊间流传的CMOS不平的问题,打算怒换B品牌全套。在下单前他冷静了一下,买了个深度计测了一下CMOS的四个角,发现至少他的这个相机CMOS非常平。这就是一个典型的快速交叉验证的例子。如果他当时真的下单了,最后也不会有改进。不如等测出来真的是CMOS不平,再下单+用数据怒喷A品牌也不迟。
做好了心理建设,现在我们可以具体解释影响导星精度和星点的技术因素有哪些。我会尽可能提供一些方法,来快速交叉验证是不是这个方面的问题,以及如果是这个问题的话,如何修正。
三脚架与极轴
赤道仪系统里一个很容易被人忽略的因素是三脚架。三脚架最主要的影响就是当赤道仪指向不同天区的时候,会产生形变导致极轴偏移。现在主流的碳纤维三脚架看上去真的非常结实,站个人上去都没有压力。但因为一方面天文摄影对精度的要求实在太高了,在角分级别,另外一方面谐波赤道仪因为不需要平衡,所以不像普通赤道仪重心永远过三脚架中心。相反,谐波赤道仪指向变化的时候,重心是跑来跑去的。这也会给三脚架带来新的挑战。所以还是需要实际测试一下。
三脚架的测试相对比较简单,就是用盒子或者SharpCap Pro之类的工具对极轴的时候,它在赤经轴旋转以后会显示一个极轴误差。可以先从零位开始,向西边旋转赤经对好极轴以后,记下极轴误差,回零位,然后再对一次极轴。但这次是向东边旋转赤经(如果是盒子的话不能向东旋转,但是可以先把赤经转到最东边然后向西旋转开始对极轴)。如果赤道仪的锁紧机构没有问题,三脚架也是绝对刚体的话,此时极轴应该仍然是同样的误差。如果三脚架有形变,或者赤道仪锁紧机构有问题的话,误差的方向和大小就会有所变化。我测试的结果是,如果不挂重锤的话,在装小小房的情况下,RT90C会出现8角分的极轴偏差,但TC40只有2角分。同时,挂不挂重锤也会影响这个偏差的程度。谐波赤道仪越平衡,就越接近传统赤道仪,重心跑来跑去的程度就越小。此时三脚架的形变也就越小,极轴的偏差就越小。另外,三脚架的形变不仅仅是管脚的变化,脚垫也是非常重要的。RT90C的橡胶脚垫非常软,我用手捏就可以让它产生相当大的形变。可想而知这样的脚垫会给极轴带来多少影响。TC40的脚垫硬不少但仍不完美,目前根据大佬的评测,类似SuperMount的钢脚垫是比较理想的。
 图2:更换了SuperMount脚垫的TC40三脚架
图2:更换了SuperMount脚垫的TC40三脚架
极轴对导星主要的影响是场旋。场旋靠导星是救不回来的。因为场旋的运动分为两部分,一个是星点整体在偏移,这部分用导星可以搞定。另一部分是星星绕着相机视场的中心在旋转。这部分运动需要旋转相机才可以纠正,在机械上就超越了导星系统的水平。所以可能会出现导星误差还可以,但星点脱线的情况。而且脱线的方向类似围绕视场中心旋转。如果出现了这种情况,就需要检查一下极轴了。
平衡与重锤
谐波赤道仪的一大特点就是不需要平衡。我以前有过观察,在其他情况都一样的情况下,把望远镜在DEC轴上移动大约20cm,导星误差只劣化了0.2角秒,甚至没有完全超出测量误差范围。但其实谐波还是需要考虑平衡的,只是角度不一样,不是追求平衡,而是追求适度的不平衡。根据CloudyNight上和其他社区的大佬介绍,谐波的PE有一个大致的趋势是随着负载的增大而减小。所以如果在靠近平衡的状态下,谐波减速器的PE反而会增大。我做了一些实验,测量了不同负载下的导星误差,并没有验证这个结论。比如我手头的这个AM5在背负小小房的时候,如果使用重锤到达一个相对平衡的状态,在天赤道附近导星15分钟,测量出的PE是20角秒左右,导星平均误差0.9角秒。但在相近的时间,同样的器材和天区,把重锤去掉导星15分钟,PE仍然是20角秒左右,只是导星的平均误差降到了0.7角秒。我有个理论是,虽然把重锤去掉以后,PE没有降低,但是整个系统的转动惯量减小了很多。这对导星这个闭环控制系统来说,等于把整个系统的响应时间降低了。这对谐波的高频导星来说是非常有好处的。所以这里有一个取舍。不用重锤,一般来说导星会变好,但同时对三角架的压力也会增大,导致极轴偏移,甚至侧翻。具体如何取舍需要实验来确定,也和每个人的风险偏好有关。如果比较保守的话,不妨加上重锤,导星差一点,至少设备不会翻。如果特别在乎星点的话,可以考虑测试一下系统的极限,在留有余量的情况下尽量减少重锤的使用。
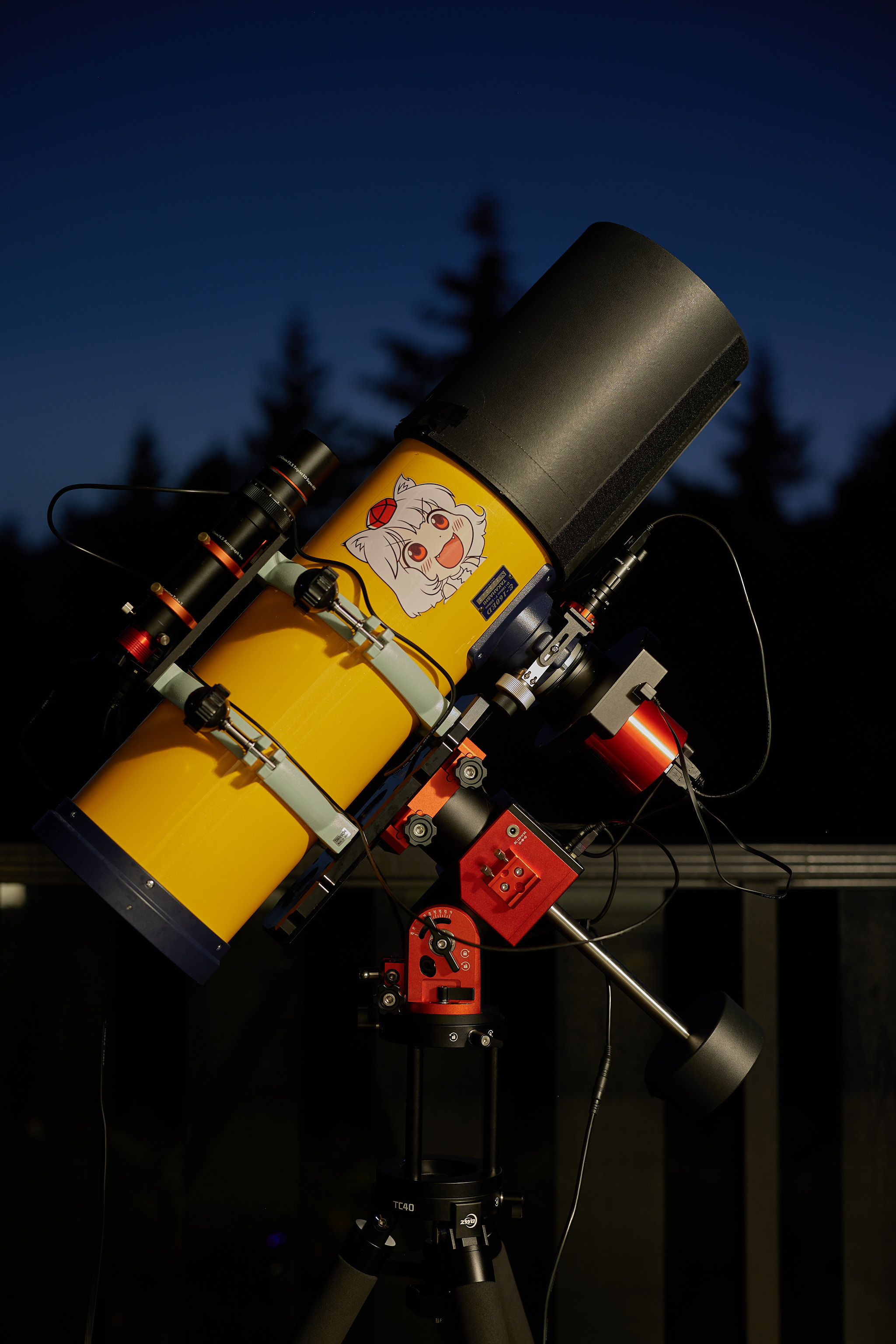 图3:在比较重的配置下,需要加入重锤来防止侧翻
图3:在比较重的配置下,需要加入重锤来防止侧翻
导星镜/OAG和bin2导星
导星镜或者OAG是一个直接影响导星质量的关键组件。一般来说他们需要满足两个要求,分辨率匹配和机械刚度。分辨率匹配指的是导星系统的每像素分辨率不能和主镜系统偏差太远。网上流传的标准是至少要到1/3,但我没有针对这个做实验。机械刚度指的是导星镜和主镜之间应该是刚性连接,主镜转了1角秒,理想的情况是在同一时间导星镜也应该转1角秒,而不是晃来晃去逐渐稳定下来——很显然这种情况会极大影响导星。这也是为什么一般推荐用OAG的原因,OAG可以更容易地保证系统刚性。不过这里我想讨论的不是这两点,而是导星镜的星点。传统上大家觉得导星镜的星点并不重要。所以一方面导星镜大都是普消,一方面网上甚至有说法导星镜有一些虚焦也无所谓。不过这次通过实验我发现不是这样。我用的导星镜是锐星FMA180,有一个减焦平场镜,不装是一个220mm焦距的星点很烂的导星镜,装上了以后就是一个180mm焦距星点很好的APO。在其他条件都相同的情况下,一旦把减焦平场镜装上(别忘了在phd里面改导星镜焦距),就可以立刻观察到phd里面显示的星点HFR变小,同时导星误差也显著变低。在跟大佬讨论以后,我们觉得这可能是因为星点集中以后,phd就可以更稳定可靠的找到星点的质心,从而给出更精确的导星动作。我们还有一个意外的发现,就是在用星点一般的导星镜的时候,如果把bin2导星打开,此时导星误差反而会变小,星点也会变好。这样的观察在多人处可以复现。一种可能的解释是,在bin2拍摄下,星点的质心也可以更稳定地鉴别。在分辨率依然匹配的前提下,此时可以改善导星质量。总之,如果想追求高质量导星的话,还是建议用一个APO导星镜,和主镜用低形变高硬度的当时扎实连接起来,或者如果镜子成像圈够大边缘星点好的话,也可以用OAG。
导星算法与周期误差
稍加实验就会发现,phd里面选择什么导星算法,用什么参数,对导星质量有很大的影响。调参的一个简单的方法是,用phd跑一个导星助手,导星助手会告诉你用什么算法,怎么设置参数。有一些经验性的东西是,有时候phd校准的时候会报错说赤经赤纬导星速率相差过大,这时候指向天赤道校准即可。有时候会报错赤经赤纬角度不垂直,这可能是视宁引起的,增加曝光时间可解。网上有一些说法说导星速率(不是导星曝光)对导星误差有影响,但我个人在AM5的实验里没有验证这个说法,0.5x和1.0x导星速率结果很接近。在RST-135e这种带码盘的赤道仪里,把导星速率设成0.1x似乎有改进。一般来说,谐波减速器的回差很小,所以可以复查一下导星助手测出来的DEC回差,如果过大(比如超过200ms)会出现DEC来回震荡的情况。此时可以考虑手动改小回差修正,或者干脆禁用DEC回差修正。
一个非常重要的导星参数是曝光时间,这里单独讨论一下。要解释曝光时间的影响,就需要先介绍一下赤道仪的周期误差。不论是蜗轮蜗杆的传统赤道仪,还是谐波赤道仪,都有一个周期误差,也就是减速器转一圈的过程中,传动轴的速度不是绝对平均的,有时候走得快一点点,有时候走得慢一点点。如果我们看赤经轴的话,把望远镜设成盲跟模式,就是有的时候星点偏东一点,有时候星点偏西一点,这个偏移有一个周期,就是减速器转一圈的时间。导星的作用就是用实时修正来对抗这个周期误差。所以我们从导星的原理可以看出来,这个周期误差的绝对大小其实并不关键,关键在于它的坡度,也就是星点偏西偏东的速度。如果星点在短时间内一下子挪了很多,导星系统可能会跟不上,就会出现拖线。如果这个周期误差非常精确的话,其实还有一种办法可以对抗,就是我们把这个误差记录下来,然后反向回放,就可以很大程度上对抗这个误差。这就是传统赤道仪的周期误差纠正(PEC)功能。遗憾的是,谐波的周期误差有三大特征,误差大,坡度陡,没有精确的周期性。所以PEC不是一个选项。周期误差大前面分析过不是一个问题,但坡度陡需要我们用一个不同的策略来设置导星参数,具体地说就是要用短曝光时间。这样可以让导星系统进行频繁修正,让每次修正的幅度在系统极限内。具体地说,我发现AM5和RST-135(没有码盘)最适合的曝光时间都是0.5s,有时候1.0s也有不错的表现。但RST-135e因为有码盘,PE小很多一般适合2~3s的曝光。曝光时间短会带来一个问题,就是可能会追着视宁带来的抖动跑。所以不带码盘的谐波对视宁更加敏感,一旦视宁劣化,导星精度会发生相当的滑坡。在phd里开启多星导星可以一定程度上缓解这个问题。
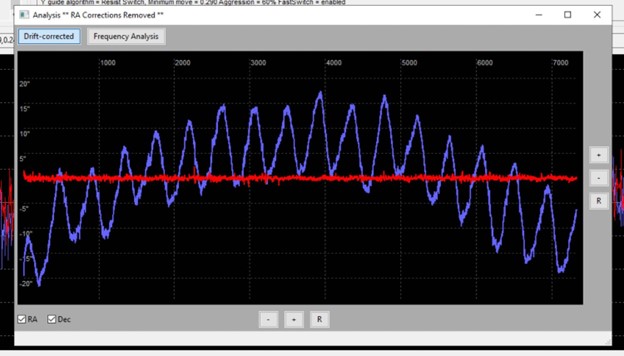 图4:图1所示的同一时间段AM5的周期误差。可以看到这个周期误差达到了20角秒,和传统赤道仪相比并不优秀,但它不影响我们达到相近的高导星精度。
图4:图1所示的同一时间段AM5的周期误差。可以看到这个周期误差达到了20角秒,和传统赤道仪相比并不优秀,但它不影响我们达到相近的高导星精度。
天区与视宁度
在赤道仪评测里面一个经常被忽视的问题是没有交代指向的天区。这个对导星误差的影响其实是非常关键的。下面是我用RST-135e在短时间内测出来的一组数据。固定赤经让望远镜指向天顶附近,只移动赤纬轴,可以测量得到不同角度下的导星误差。为什么会这样,可能是多个因素综合作用的结果。一方面,不同的角度,赤道仪的负载不一样,PE及其坡度可能有不同,有可能天顶的这个角度正好PE的坡度最小。一方面越靠近天顶,望远镜要穿透的大气越薄,视宁越好,这也会改善导星。
| 赤纬(度) | 距天顶的角度(度) | 赤经导星误差(角秒) | 赤纬导星误差(角秒) | 总体误差(角秒) |
|---|---|---|---|---|
| 0 | -50 | 1.04 | 0.81 | 1.32 |
| 10 | -40 | 0.88 | 0.76 | 1.17 |
| 20 | -30 | 0.54 | 0.31 | 0.63 |
| 30 | -20 | 0.47 | 0.41 | 0.60 |
| 40 | -10 | 0.24 | 0.38 | 0.45 |
| 50 | 0 | 0.23 | 0.30 | 0.38 |
| 60 | 10 | 0.32 | 0.33 | 0.46 |
| 70 | 20 | 0.35 | 0.60 | 0.70 |
表1:同一时间,同样器材,不同天区的导星误差
总之,我想强调两点结论。第一,赤道仪评测的时候单单贴个导星误差截图出来参考价值相当有限。天区是哪一块,三脚架用的是什么,导星镜星点如何,导星算法是如何设置的,视宁度怎么样,等等等等,有太多的因素可以让两个截图直接无法直接对比。更科学的方法是用同样的硬件,在同一个地方和时间,对同一片天区测量,然后比较。第二,导星是一个非常复杂的系统工程。它很难,但只要坚持控制变量,快速交叉验证,遇到挫折也用科学的态度来分析如何设计实验、分解问题,它也是可以学习和掌握的。
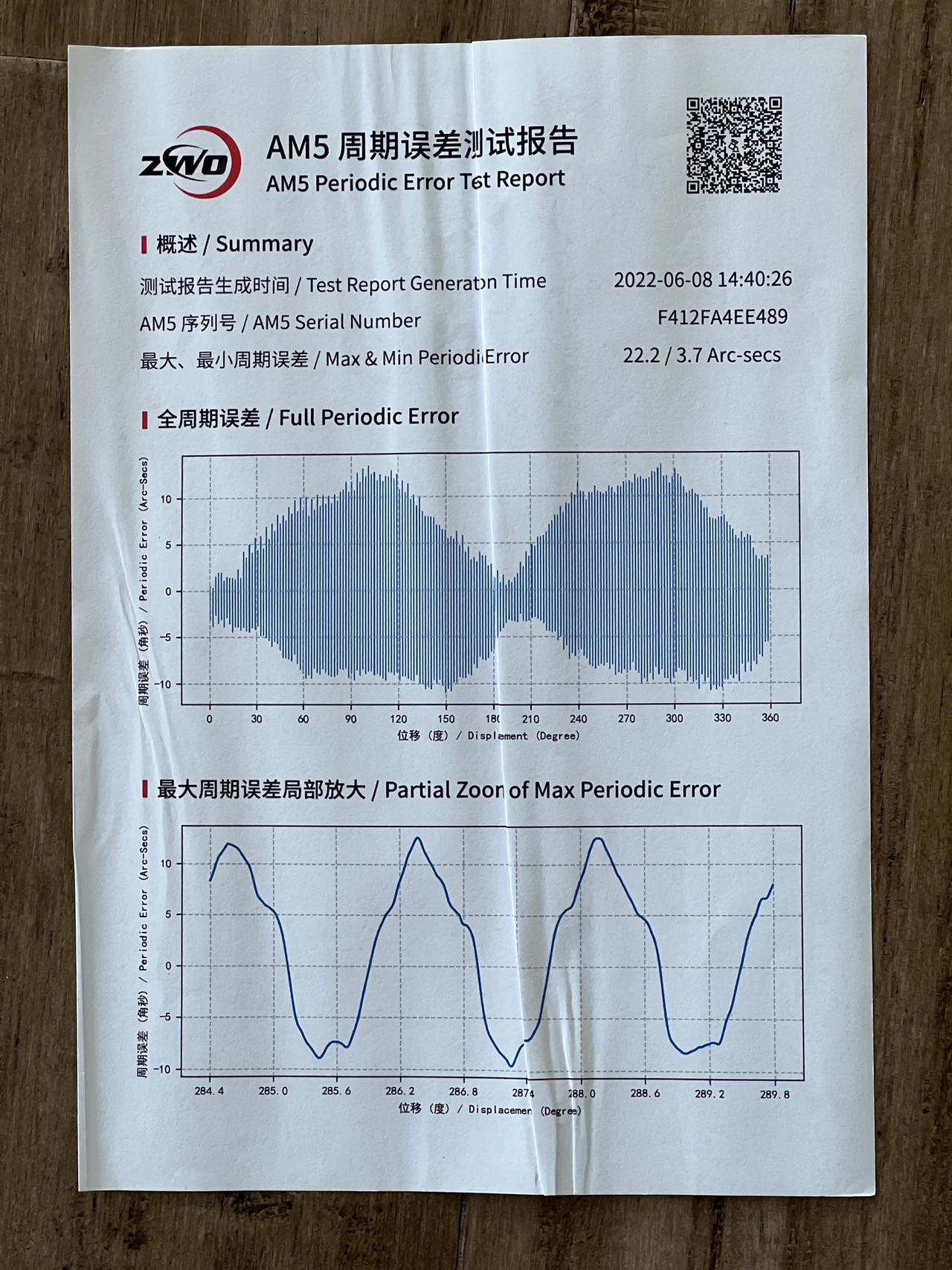 图6:我拿到的这个AM5的检测报告
图6:我拿到的这个AM5的检测报告
回到AM5,在把上面说的因素一个个调整以后,我很惊讶的一点是对短焦系统(我用的是530mm焦距的中黄),AM5竟然可以实现和4倍价格的RST-135e非常接近的性能。在同样的三脚架,器材,天区(天顶附近),和相近的时间下,RST-135e可以达到0.3+角秒的导星精度,2.5+像素的星点半宽(HFR),AM5可以达到0.4+角秒的导星镜度,2.6+像素的星点半宽。我还测试了AM5在5分钟,10分钟,和30分钟下的星点半宽(HFR),几乎没有变化。为了测试稳定性,我让AM5拍一整晚,然后进phd2 log viewer来看平均导星误差,仍然很稳定(见图1)。和我在同样的赤道仪群的人应该知道,我一直不相信这一点,花了很多时间从硬件和软件的角度来调优RST-135e,最终把RST-135e优化到了稳定0.3+角秒的程度。我相信这是一个合理的谐波赤道仪表现标杆了,甚至可以和AP等老牌传统赤道仪相比。但当我把同样的调优方法应用到AM5上以后,AM5也可以到0.4+角秒。我又一度怀疑是不是ZWO特挑送测了一个特别优秀的个体,所以在AM5群里询问大家的周期误差报告长什么样,结果发现我拿到的周期误差在群里甚至属于中等偏下的。唯一的例外是如果我们根据报告计算周期误差的坡度的话,我的坡度算是中等偏上。所以,经过几十个小时的测试和找茬和交叉验证,我终于接受了这个结论,愿意在这里真心无保留地推荐AM5。至少我手上拿到的这个个体(TC40+二代增高节+AM5)是一个非常优秀的谐波赤道仪系统,指标非常硬。我对它的极限在哪里也非常感兴趣,但现在手头没有长焦大镜子,可以等500年后我的12.5寸RC到了以后,再让RST-135e和它PK一下。