鸡翅膀,稳定性和上反角
除了升力来源和失速特性不一样以外,四轴/直升机和固定翼还有个本质不同,就是系统的稳定性不同。所谓系统的稳定性,举个栗子吧。你找个碗,在碗里放个乒乓球。乒乓球一下就滚到碗底了。你用手轻轻拨一下球,它会自动回到原来的位置。这个系统就叫稳定系统——当系统受到微小扰动的时候,它会自己回到原先的状态。而你找个博士,让他用筷子顶一个球,不断调整筷子的位置让球保持平衡。这就叫博士顶个球。这个系统就是不稳定系统。看上去它是稳定的——球一直没有掉下来嘛。但那个球哪怕被一点点风一吹,底下那个人就要立刻调整棍子的位置和角度,才能维持原来的平衡状态,否则球就掉下来了。
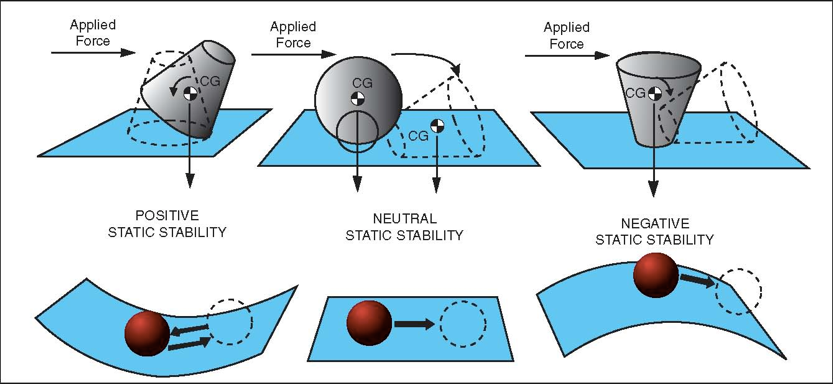
我们玩的固定翼航模就是一个稳定系统,而直升机/四轴是个不稳定系统。想想看,固定翼的飞机,飞得好好的,突然迎面来一阵风,翅膀相对空气的速度增大,升力增加,呼地就上升。上升的过程中因为能量守恒速度减小,翅膀的升力逐渐减小,直到和重力平衡。除了升高了一点以外还是平飞。这也是为什么对于固定翼飞机来说,只要做好了适当的配置(油门,配平),把手松开它可以一直飞下去。
但直升机不一样。想想一个悬停的直升机,一阵风吹来,向前挥舞的桨叶升力增大,向后挥舞的桨叶升力减小,(周期变距一下没反应过来)就歪了。歪了本身没啥,但问题是这样破坏了原有的平衡,竖直上的升力不够了,飞机开始下降,同时有了水平方向上的分量,开始平移。顶上的大螺旋桨是个大陀螺,当飞机(左右)歪的时候它会产生进动,推动飞机向另一个方向(前后)歪(还记得在科技馆里拿着旋转的自行车轮胎会推着你自转吗)。所以整个螺旋桨的方向就乱套了,如果不及时纠正的话会越来越歪越来越歪,最后坠毁。这就是为什么直升机在操作的时候会这么累,要不断地根据姿态来进行纠正。真正的直升机的飞行员在飞行的时候也是非常紧张的,调个无线电频率也是稍微松下手拧一下,然后立马回来扶杆,然后再拧。相比之下固定翼的飞行员直接双手放把就去哐哐拧了。至于四轴,也是同样的不稳定,它能飞起来全靠飞控算法每秒几十次的纠正姿态。这也是为什么自制四轴要调飞控参数调一两周,但固定翼装好就能凑合飞的原因。
关于平衡性有个更直观的例子,下次去超市买菜,你找个购物车推一下。一般都是拿着后面的把手往前推,这个系统是一个稳定系统,即使推歪了它自己有个力会纠正回来。但如果你倒着推(拿着购物车的前面,向购物车的把手方向推,不是拉)就会很明显地感觉到不同。只要有一点歪,就会很快越来越歪越来越歪,甚至原地打转。下次去超市试试!
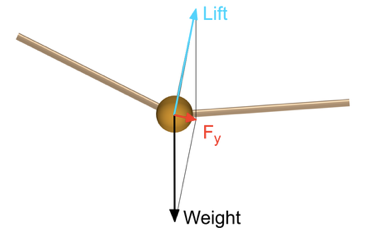
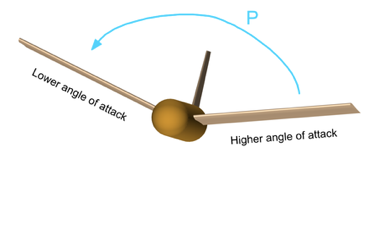
但飞机的稳定性是可以改进的。一个方法叫做上反角。向下图这样,鸡翅膀在安装的时候不成180度,而是成一个向上的略微的钝角。这样当飞机稍微歪一点的时候(和直升机一样)竖直方向的升力减小,飞机在水平方向上开始侧滑。而这个侧滑会导致低的一侧的翅膀的角度比高测翅膀的角度更大,提供更大的升力,从而让机体恢复原来的状态。实际上很多大点的多轴也开始用这样的设计来增加飞行稳定性了。比如最近很火的亿航的多轴无人机。

鸡翅膀,机械效率和大型/载人四轴
虽然螺旋桨和鸡翅膀的原理并无二致,但固定翼和直升机/四轴在能量的消耗上非常不同。如果我们看同样的能量能让两种飞机跑多远的话,直升机/四轴明显是占劣势的。这是因为飞机基本上所有的动力都用来拉着它奔向目的地了,效率满分。但直升机在悬停或慢速飞行的时候大多数动力是让它在空中漂浮的。此时能量的利用率非常低。要想让利用率变高,只能装个超大的马达,飞超快,让向前的力占所有动力的大部分。然而由于失速的存在,直升机/四轴的速度没到多快就会翻滚坠毁。因此总体来看它的效率注定就很低。此外,固定翼的马达可以特别轻小,因为它提供的动力只需要足够克服空气阻力(一般是机身重量的1/10到1/3)就可以了,但直升机的马达需要克服所有机械结构和电池的重力,必须大马力。但大马力就必然重,也需要更大的电池。这些都限制了直升机和四轴的载重。从数据上来看,淘宝上一两百买的翼龙套机装个烂电池飞个半小时毫无压力,弄两三块电池飞行时间可以突破一小时。但一万块钱买的大疆精灵用锂聚合物电池也只能飞二三十分钟而已。
综上所述,相比于固定翼,四轴需要更强力的马达,更好的电池,更大的自重,更复杂的机械结构,来实现更短的续航,更差的稳定性,更低的机械效率,和垂直起降的能力。遗憾的是,这些劣势在航模尺度增加,甚至变成载人尺度的时候会急剧放大。我个人认为,四轴的流行主要得益于飞控算法和悬停拍照的需求。你看大疆的广告语,它做的其实根本就不是无人机或者航模,而是会飞的相机啊。如果只是对航拍感兴趣而不一定要悬停的话,去买个固定翼航模吧,一小片草地或者水泥地也可以起降了。而且我并不是很看好四轴无人机的大型化,前面所说的是物理原理上的硬伤,很难改变的。但大的固定翼飞机的确也很难实现短距离起降,非常不便。所以也许未来的趋势应该在Google发展的垂直起降的固定翼无人机(Project Wing)上吧。
