在上一篇文章中我们介绍了关于器材方面的很多萌新坑。这篇文章主要介绍一下我在前期拍摄中踩过的坑。因为坑都是很琐碎的,所以这个主要以FAQ的问答形式展现。每个问答先展示问题所在,然后阐述原因和解决方法。食用方法是,可以先浏览一下,等以后遇到问题的时候再来搜索。此外,这个文章仅仅包括在前期时候就能发现的坑,还有很多陷阱是要到后期才能发现的,我们之后再说。
拍摄坑
- 寻星:小白如我,遇到的第一个问题就是如何寻星。如果赤道仪有goto功能还好,没有goto的话就只能star hopping慢慢找了。这个时候如果有一个红点寻星镜,并且之前用月亮或者远处的灯光把它调成同轴了的话会方便很多。但是我想推荐的方案不是这个。这里要强烈推荐一个工具,就是任何可以做plate solving的软件。比如我用的是ASIAir,app就有这个功能。电脑端也有很多软件有这个功能,比如Nina,SGP,MaxIM DL。Plate solving指的是,根据一张拍出来的图片,解析里面的星星的相对位置,然后告诉你它在天球上的坐标。如果赤道仪带goto的话,这个软件可以直接略过三星校准,控制相机拍一张照片,得到赤经赤纬。如果这个坐标和目标坐标不一致的话,就再控制赤道仪指向修正后的方向。在大多数情况下这一次就可以指向要拍的对象了,而且下面的goto也会非常精确大多可以一遍成功。如果赤道仪不带goto的话,解析出来的赤经赤纬也很有用,可以指导我们下面往哪个方向移,移多少。
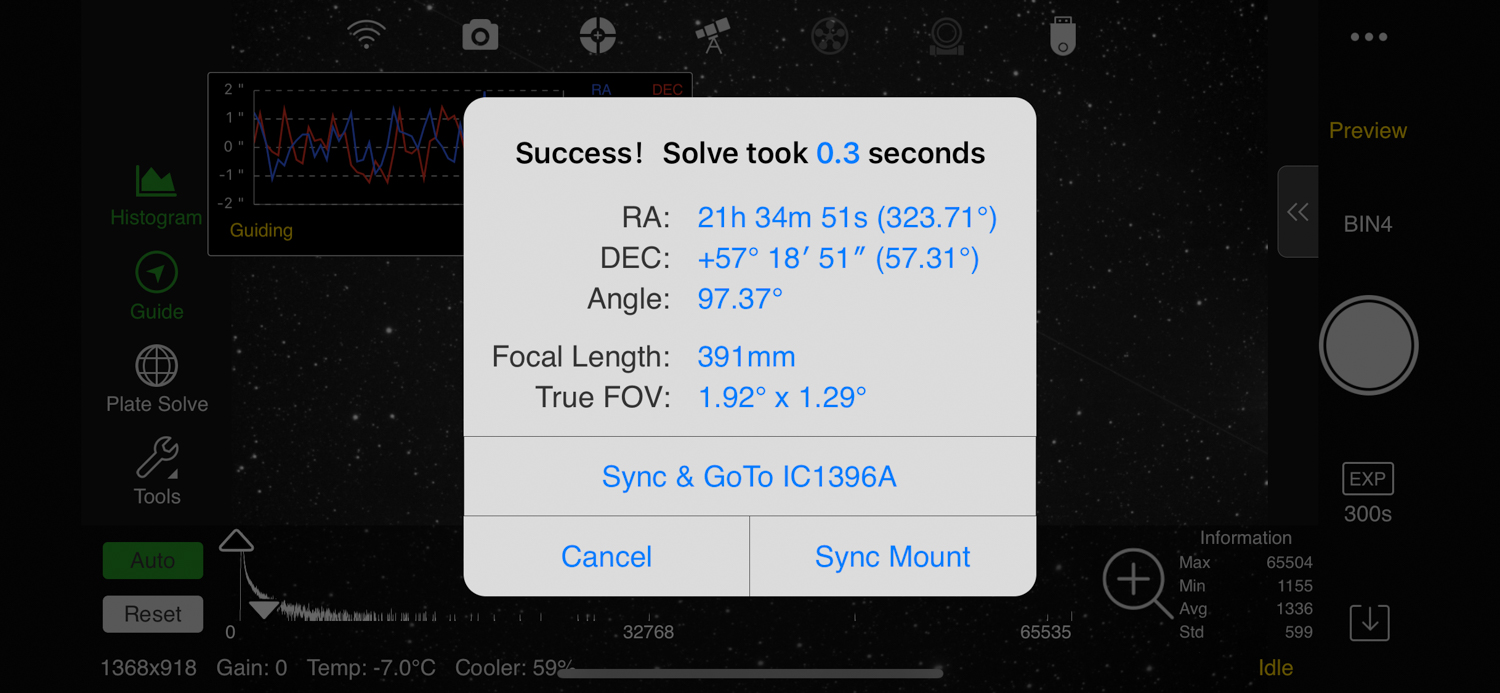
- 构图:但仅仅用plate solving把图像放到图像中间还是不够的。比如下面的这张图,就是因为分了两天拍,中间因为种种原因把相机旋转了一下。然后就发现两边的视野对不齐了。所以要么记住不要旋转,要么就把plate solve的结果截个图,下次构图的时候也要把angle对齐。

- 对焦:我以前对焦的时候就偷懒,看着对焦界面的FWHM弄到好像最小了就停了。但后来发现这样的精度还是不如鱼骨板。但用鱼骨板也有不方便的地方。一个是用HyperStar的时候需要把相机取下来,装鱼骨板,把相机装上去,对焦,再把相机取下来,卸鱼骨板,把相机装上去,极其恶心。一个是鱼骨板会大幅降低星星的亮度,所以要增大曝光时间,很不方便。尤其是拍窄带的时候更是如此。后来我用两个方法解决了这两个问题。前者用一个分体式的鱼骨板就好。我是自己建模打印了一个,但网上也有卖的。后者是goto到一个亮星,对焦,然后再goto回来。因为有plate solving,所以这俩goto都很方便而且精确。要是以前没有plate solving的情况下,就算做了三星校准我也是很抗拒这么做的。
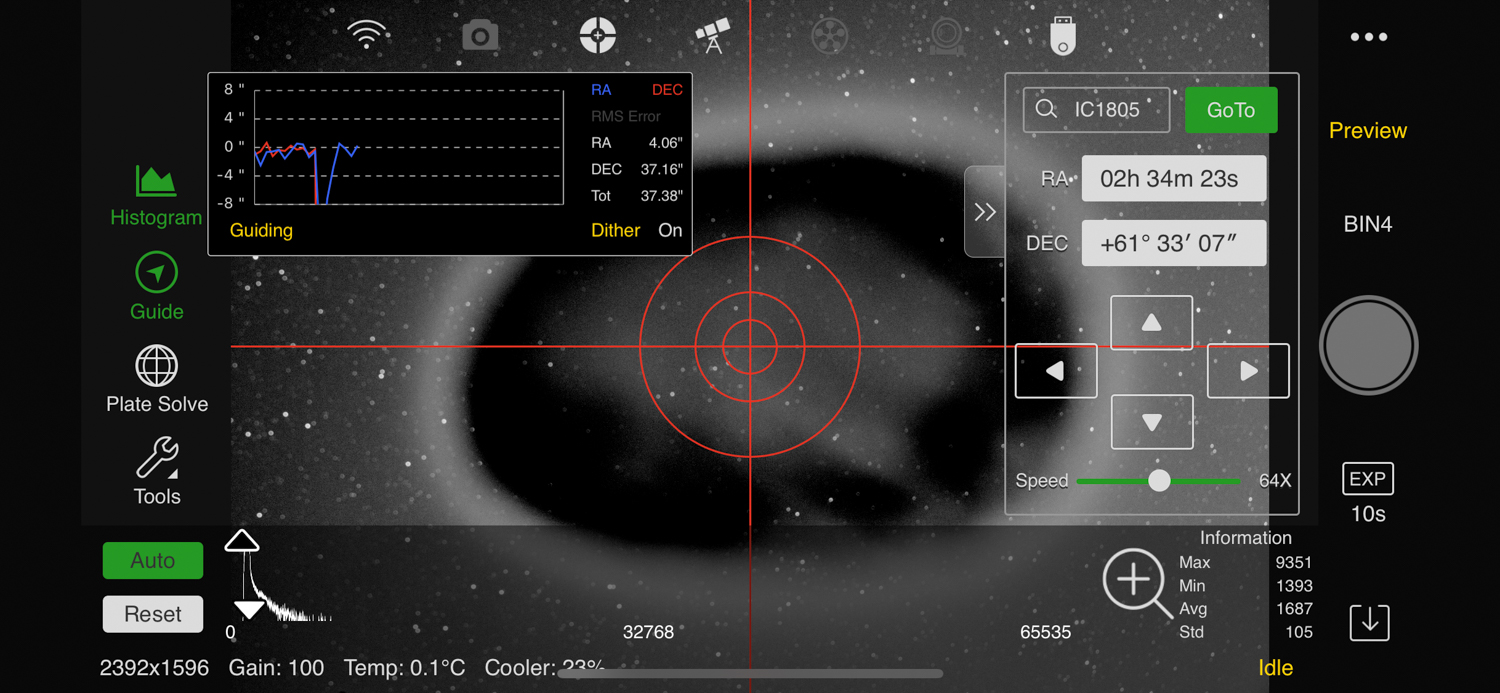
- 结露:有时候,尤其是刚换上相机的时候,拍的时候会发现画面中有一个黑洞一样的东西(见下图)。这个东西的轮廓相对分明。这往往是因为相机结露了。如果相机带抗结露加热功能的话,直接打开,一般半分钟之内就会好。不带的话可以用擦镜布擦擦。如果是单纯地变暗,同时星星的对比度降低,而不是像这种有分明轮廓的话,一般是物镜结露。物镜结露可以用外置加热带解决,或者折射/折返的话也可以套个遮光罩防止/减缓结露。如果已经用了遮光罩但还是结露的话,可以查一下是不是没套好,中间有缝之类的。
跟踪坑
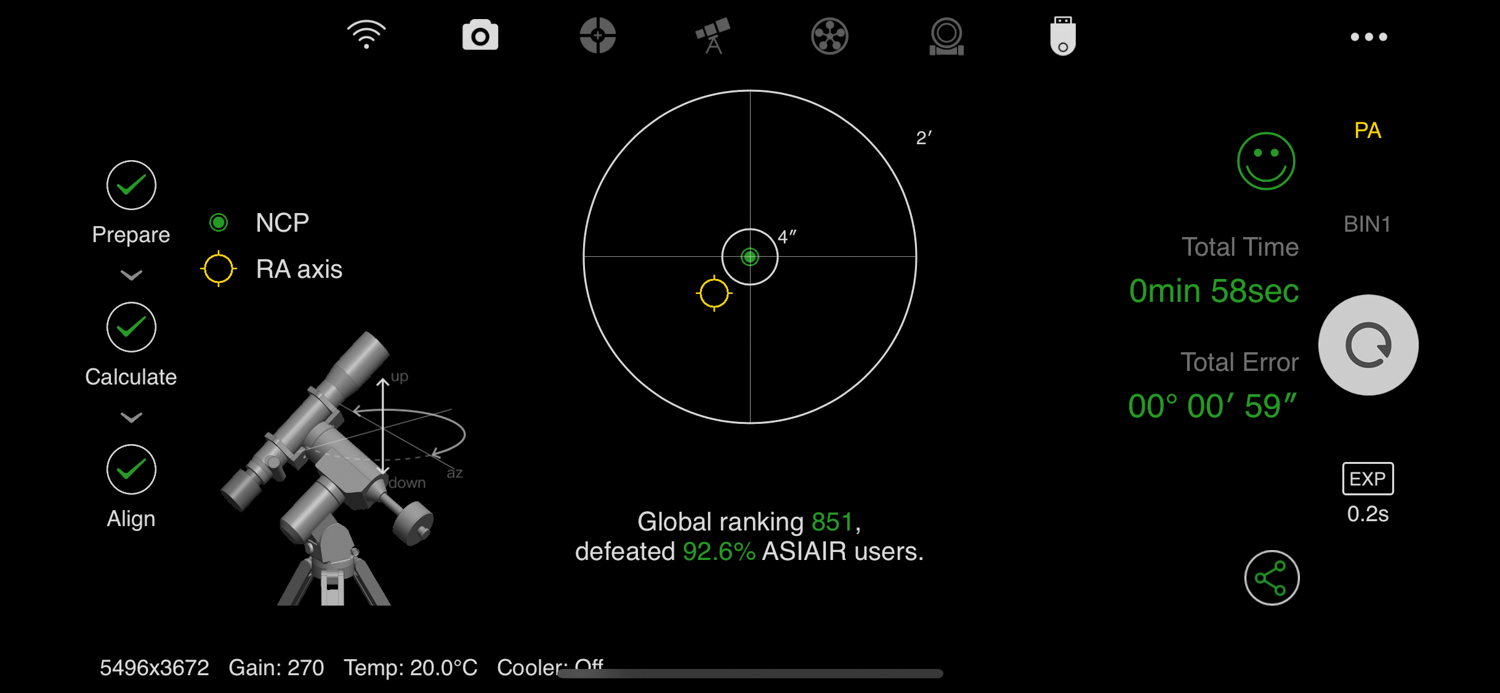
- 精对极轴:要延长单帧的曝光时间降低read noise的影响,极轴的精确性是非常重要的。但一般就算用了极轴镜对了极轴,单靠导星还是很难突破5分钟,所以还是需要更精确的方法来对极轴。据说电子极轴镜可以有效提高精度,但我没有用过,因为其实我们可以用导星相机来直接实现精对极轴。同样是前面提到的软件,我用的还是ASIAir。基本原理是,它在赤道仪的初始位置(指向北天极)拍一张照,然后控制赤道仪RA方向转60度再拍一张照。用这两个照片就可以计算出极轴偏移的角度。下面它会持续拍照,更新告诉你现在还差多少,往哪个方向移动。只要调整螺丝,让下图中的小黄点尽可能地靠近小绿点就好了。熟练了以后这个操作可以很快,一般可以在3分钟之内搞定。你看我这个只花了58秒,打败了全球92.6%的用户 >_<
- 单轴赤道仪的配平:对赤道仪来说,为了跟踪精度,配平是必须的。有的赤道仪比如艾顿大星野的DEC方向不能自由旋转,很难判断有没有配平。此时可以通过旋转RA方向来判断有没有配平。DEC方向配平了的标志是,RA方面只要在一个位置调整重锤让它平衡,随便怎么转(RA轴),(RA轴)也始终是平衡的,不需要移动重锤。
- 配平也不能太好:但我发现如果配平太好也会有一些问题。往往是回差(backlash)表现的比较明显,一阵风吹来,望远镜会微小地点头。导星也会出现某个轴矫正了但没有反应的情况。这个情况在稍微破坏平衡以后一般可以解决。
- 格格的响声:如果赤道仪在转向某些角度的时候发出了格格的响声的话,一般说明配平有很大问题。或者如果赤道仪有离合器(clutch)的话,也可能是离合器的锁紧螺丝没有拧紧。
- DEC停止响应:体现为用手柄/手机控制赤道仪goto,只有RA转了过去,DEC没反应。这往往是DEC的连接线没有连好。
- 艾顿大星野电机卡死:体现为,按左右箭头按钮电机不旋转。同时停止跟踪。我到现在没找到具体是什么原因,但发现1) 合理的配平可以大幅降低卡死的几率;2) 我把赤道仪拆开重置了一下电机,配合合理的配平就再也没有出现这样的问题。重置电机的方法在这里。
导星坑
- 导星直接飞掉:有时候一启动导星,发现PhD2在正常发送指令,但导星误差不减反增,甚至直接飞掉(超过8",曲线都看不见了)。这往往是因为用的是失效的校准(calibration)数据。导星的原理是比如发现星星往上偏了1",就发指令给赤道仪让它向南转1"来补偿这个偏移。但注意相机看到的只有上下左右,不是东南西北。它需要通过测量来知道如果星星往上偏的话,需要给赤道仪发什么样的指令,让电机在RA和DEC方向转多少步。这个测量的过程就叫校准。导星飞掉往往是因为,比如前一天做好了校准,导星没问题。第二天重新装了赤道仪和导星相机,结果导星相机的方向变了,东南西北全乱套了,所以导星算法给赤道仪发的指令全是照着昨天的方向来的,南辕北辙,自然就失败了。解决方法很简单,把校准数据清空重新校准即可。
- 导星仅RA方向直接飞掉,但DEC方向是好的:这主要是因为RA方向的方向反了,但DEC方向是正确的。为什么会出现这样的情况呢,主要是因为赤道仪自己做了中天翻转,但导星程序不知道。解决方法很简单,在Calibration界面里面把flip勾上(或者取消)即可。或者用导星程序做中天翻转,这样它会自己知道把flip勾上。
- 导星校准失败:这个一般是因为选择了错误的DEC mode。比如在校准艾顿大星野的时候,因为它是单轴电跟,没有DEC电机。但如果DEC mode还是选auto而不是off的话,导星程序就会给它狂发DEC方向的指令,然后发现咦怎么没反应,校准就失败了。解决方法是把DEC mode改成off。
- 导星RA停止跟踪:我到现在还不太清楚这是什么原因。但发现几个措施有助于缓解这个情况:1) 重启导星或者重启ASIAir盒子往往可以短期解决这个问题,但有可能复发;2) 破坏RA方向过好的平衡以后这个状况更少发生了;3)换用更轻的镜子以后这个现象更少发生了。但偶尔还是会有。
- 导星正常发出纠正信号,但赤道仪不响应,如下图所示:这个是因为对应的轴(图中是DEC)的平衡没做好。把平衡调好就好了。
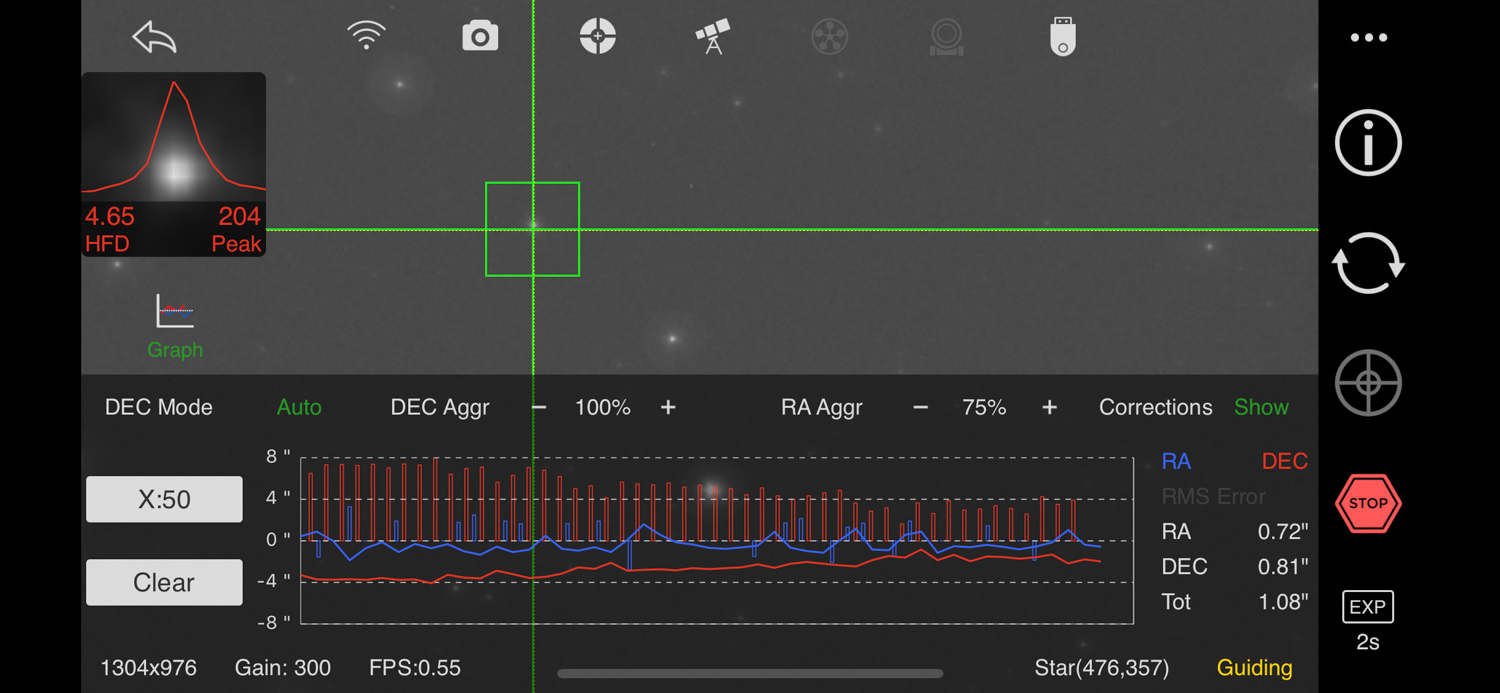
- 导星误差忽然增大,如下图所示:这个是因为忽然来了一阵风。基本上无解,只能找个避风的地方,或者换用更大的赤道仪。在Cloudy Nights也看到有人在问类似的情况后来发现是地震了。。

嗯,以上所有的坑,我一个一个全都踩了一遍。。希望能对萌新们有所帮助。下一期我们继续介绍后期里面的坑,和只有到了后期才能发现的前期的坑。这些坑并不可怕,关键是不要瞎试企图瞎猫碰上死耗子解决问题。而要用逻辑去分析,探求背后的原理,用一系列小实验来分割问题可能的来源,提出假设并且用实验去验证。当然我拍深空也只有一个月,很多理解也可能是错的。也希望各位dalao不吝指正。