最近无人机特别火,有拍照的,有载人的,美国要注册否则罚款蹲监狱,中国启动军机拦截。我们就从最简单的鸡翅膀开始聊聊,讲讲飞机/无人机关于空气动力学的那些事。
鸡翅膀,升力和失速
不论是一般的民航客鸡还是Geek们玩的四轴,能飞起来都离不开一个东西:鸡翅膀。高中就学过啦,鸡翅膀能飞起来靠的是空气流过上下面产生的压力差,这个叫升力。当升力大于飞鸡的重力的时候,飞鸡就飞起来啦。 至于这个翅膀和四轴无人机有什么关系呢?其实螺旋桨就是旋转的机翼,它之所以能产生升力和一般的固定翼飞机是完全一样的,但在明了了原理以后,里面又有很多微妙的差别。我们后面说。
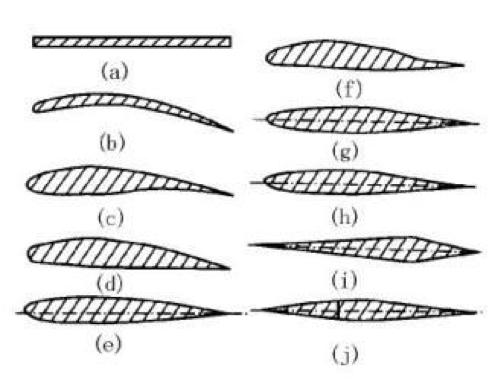
前面说到翅膀产生升力,升力和哪些东西相关呢?除了直观地和翅膀的形状以及速度相关以外,还有个至关重要的因素是和翅膀抬的角度有关。直观地想象一个完全是平板的翅膀(比如上图(a)),当翅膀完全水平的时候,显然没有升力。翅膀完全竖直的时候就尼玛一块板往前推,也没有升力。但比如翅膀和水平成10度角往前跑的时候,自然有个非零的升力。所以升力和这个翅膀抬得角度的关系是,随着角度增大,先增加,再减少。如果我们画一个图,横坐标是这个角度,纵坐标是升力的话,它看起来是这个样子的:
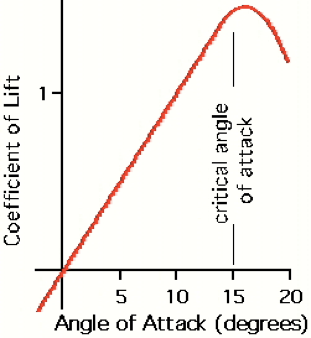
一个有意思的现象是,在飞机正常飞行(角度比较小,也就是平着飞,不是竖着往上飞)的时候,你一拉杆,飞机头翘起来,角度变大,这个升力也会变大,飞机上升啦。你一推杆,机头往下走,角度变小,升力变小,飞机下降啦。但如果猛地一拉杆,翅膀的角度急剧增大,在上面的图里超过15度,升力会急剧减小。这个现象叫做失速,它意味着飞机还在高速往前跑,但升力急剧降低,在往下掉了。这是非常危险的,一方面如果不及时提高升力的话你心爱的航模会炸机,真飞机会坠毁;一方面这种情况下要提高升力的方法非常反直觉,你要推杆把这个角度减小才可以——也就是需要降低机头来增加高度。人在紧急情况下很难跨过这个牛角尖。
那么失速和我们的无人机有什么关系呢?关系大了。对于固定翼来说,因为引擎电机的最大功率是一定的,所以飞机飞的最高速度一般就那么快是定死的。这时候决定最大升力的因素就剩这个角度了。但因为失速的存在,升力的提高也是有极限的。就是这个极限,决定了你的飞机能装多少东西/电池。而对于四轴/直升机来说失速更加限制了最高速度——即使你是土豪有个100000kW的电机,无人机的速度也不能无限增大。为了理解这一点,我们先来看看螺旋桨的原理。
鸡翅膀,螺旋桨和风
螺旋桨的剖面长这样:
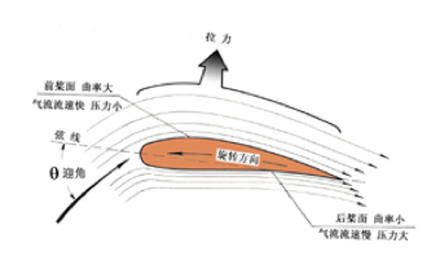
尼玛放错图了吧。。这不是普通的鸡翅膀么?!额,其实并没有,这真的是螺旋桨的剖面。他就是两个鸡翅膀连一起然后转啊转啊,鸡翅膀总是在相对空气运动,就产生升力——这里就是拉力了。但我们看到的螺旋桨并不是这样平直的,而是往往有个扭曲,类似下图。
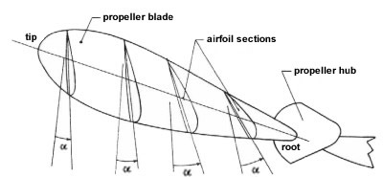
这是为什么呢?还记得升力(这里是动力)和角度的关系吗? 在上面的图中,可以想象螺旋桨在向下拍打空气,图中标出的角度就是上面说升力的时候提到的角度。螺旋桨的翅根(线)速度慢,用大角度来提供相对较大的升力,翅尖速度快,角度稍微小点来让升力和翅根大小相近。构建和谐社会,大家升力均衡才有利于螺旋桨的科学发展嘛。
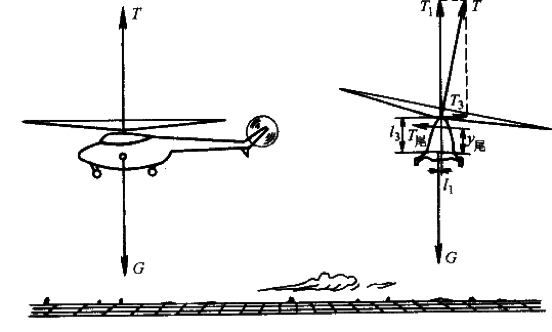
然后你把这个图竖起来,就是四轴或者直升机的螺旋桨啦。我们现在来看最简单的情况,有一个直升机在悬停。好吧,一个螺旋桨转吧转吧,它的两个叶片相对空气运动,产生升力。升力和重力平衡,所以可以悬停(下图左)。。等下好像哪里不对?螺旋桨旋转的力矩反作用于机身,机身自己也会向反方向旋转啊。。对头,这就是为什么要有个尾桨。加个尾桨,好吧现在力矩平衡了。等下。。尾桨自己也是个螺旋桨,他也在不断产生升力/推力把直升机向一边推啊。。(下图右的T_尾,在把直升机向左边推)那只好把顶上的大螺旋桨向右倾斜一些,产生一个向右的分量T_3来和T_尾平衡了。所以你看,一个“悬停”一点都不简单,他是一个非常复杂的受力和力矩平衡状态。这也是为什么很多固定翼航模到手就能飞,但直升机要想悬停住要练很久的原因。
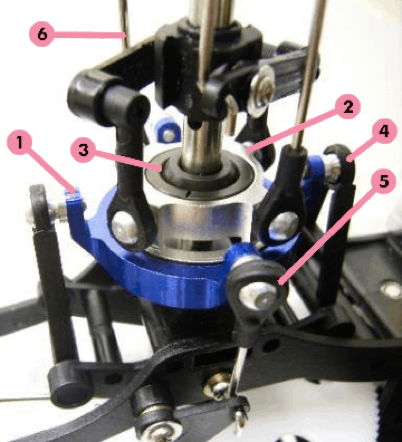
好我们看完了最简单的情况,让直升机向前飞起来吧!有没有发现向前飞起来以后整个故事完全就不一样了!还记得升力和哪些东西相关吗?速度越大,升力越大。在失速以前,角度越大,升力越大。直升机的螺旋桨在同一时刻,肯定有一个桨叶向前一个桨叶向后转。因为直升机自己在向前飞,向前转的桨叶/机翅膀相对于空气的速度更快,向后转的鸡翅膀相对空气的速度更慢。所以两边的升力是不一样的。我擦,这尼玛是要翻的节奏啊。肿莫办?速度改不了,只能改角度了。所以直升机上面有个叫周期变距器的东西(下图),“距”就是我们上面说的角度。它在翅膀往前转的时候把角度变小一点,往后转的时候把角度变大一点,这样两边的升力就可以平衡了,飞机就不会翻了。所以你看上去直升机的螺旋桨只是在旋转而已,其实它同时在不停地挥舞。呼~~拯救世界一点都不轻松啊。
然后直升机的上升和下降也是通过这个变距器实现的。飞行员“拉杆”,变距器把两个桨叶的角度都变大,发动机转速不变,升力增加,直升机就上升。反之角度减小,发动机转速不变,升力下降,直升机下降。是不是和直观的理解不一样?(非玩具的)直升机不是通过控制螺旋桨的转速来控制升力的,而是通过控制螺旋桨的角度来控制的。为什么呢?这是因为改变转速是要克服螺旋桨自身的惯性的(克服惯性力矩),直升机越大,螺旋桨越重,惯性就越大,改变转速就越困难。表现在控制上就是直升机越大控制就越“肉”。但下面会解释,直升机和四轴的控制非常要求频繁且灵敏的调整,所以利用周期变距,一方面解决了有风的时候升力不平衡的问题,一方面也可以敏捷地改变升力大小,对直升机来说是非常重要的。
那螺旋桨会不会失速呢?会的。比如一阵大风吹过,向后转的桨叶相对空气速度突然减小,在变距器做出反应前,翅膀的角度不变,升力因为空速减小而减小。然后变距器发现我擦不对啊,两边升力不平衡了,就升高向后转的桨叶的角度,升高高高,高到最前面那个图里的15度,结果尼玛就失速了。或者直升机飞得太快也会发生类似的情况。这时候直升机一边翅膀没有失速正常产生升力,一边翅膀失速了升力骤减,就会翻掉。。而且很难恢复。。注意,除了尾桨可以省掉以外,这些问题在多轴里,都是完!全!一!样!的!
正因为这种失速的存在,直升机和四轴都有一个速度上限,这个上限不是引擎的马力决定的,而是因为到了这个速度以后,向后挥舞的桨叶会失速导致机身产生无法恢复的翻滚,继而炸鸡。
Comments